Contents
愛称「KUKAI」 2009年1月23日打上 CW受信 Information
■ はじめに
■ トピックス
■ プロジェクト履歴
■ お問い合わせ
links
■ 能見研究室
■ 石敏鐵工株式会社
 |
STARSプロジェクト
Space Tethered Autonomous Robotic Satellite |
| |||||||
|
TOP > STARS > TSR-S
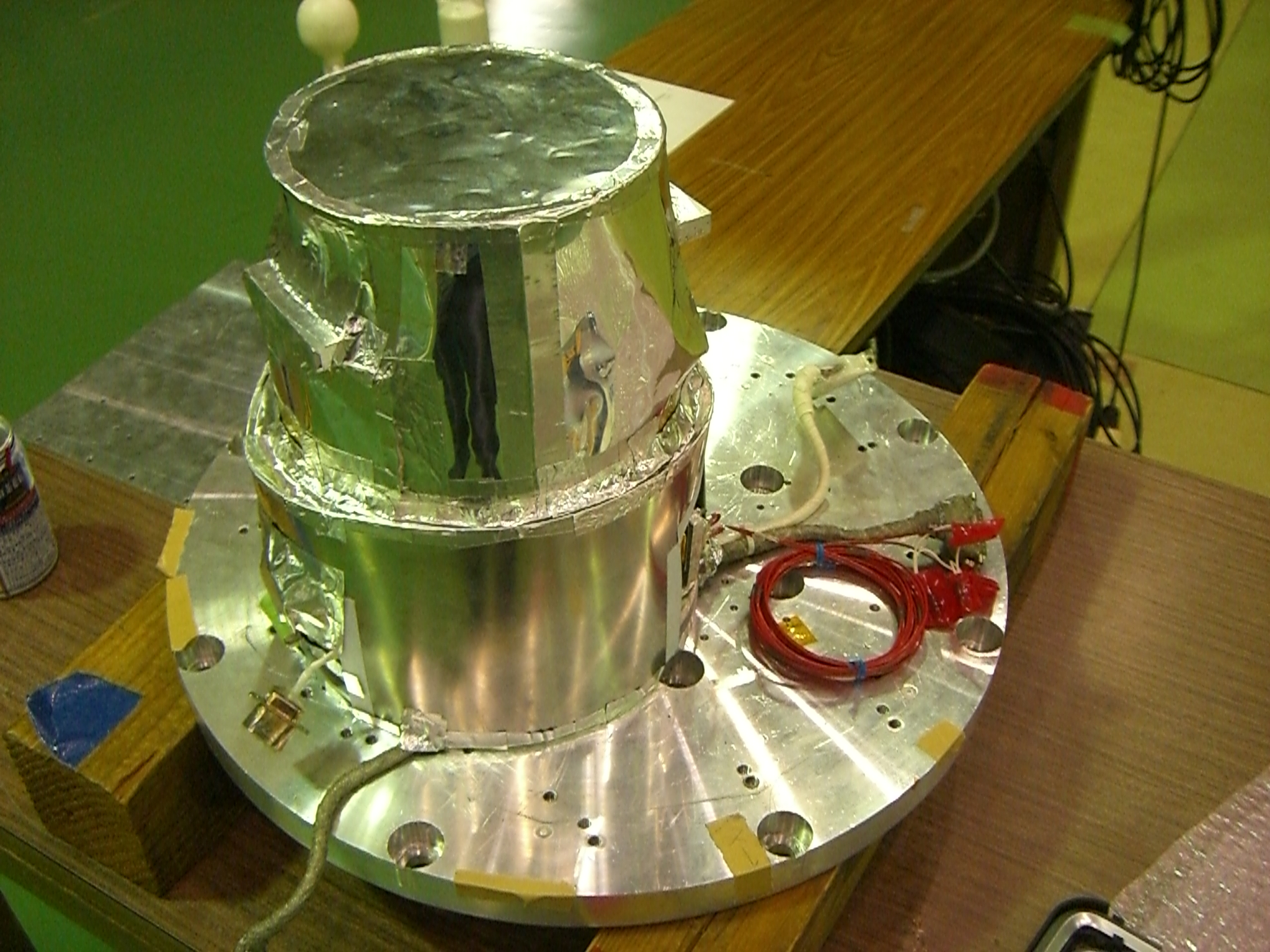
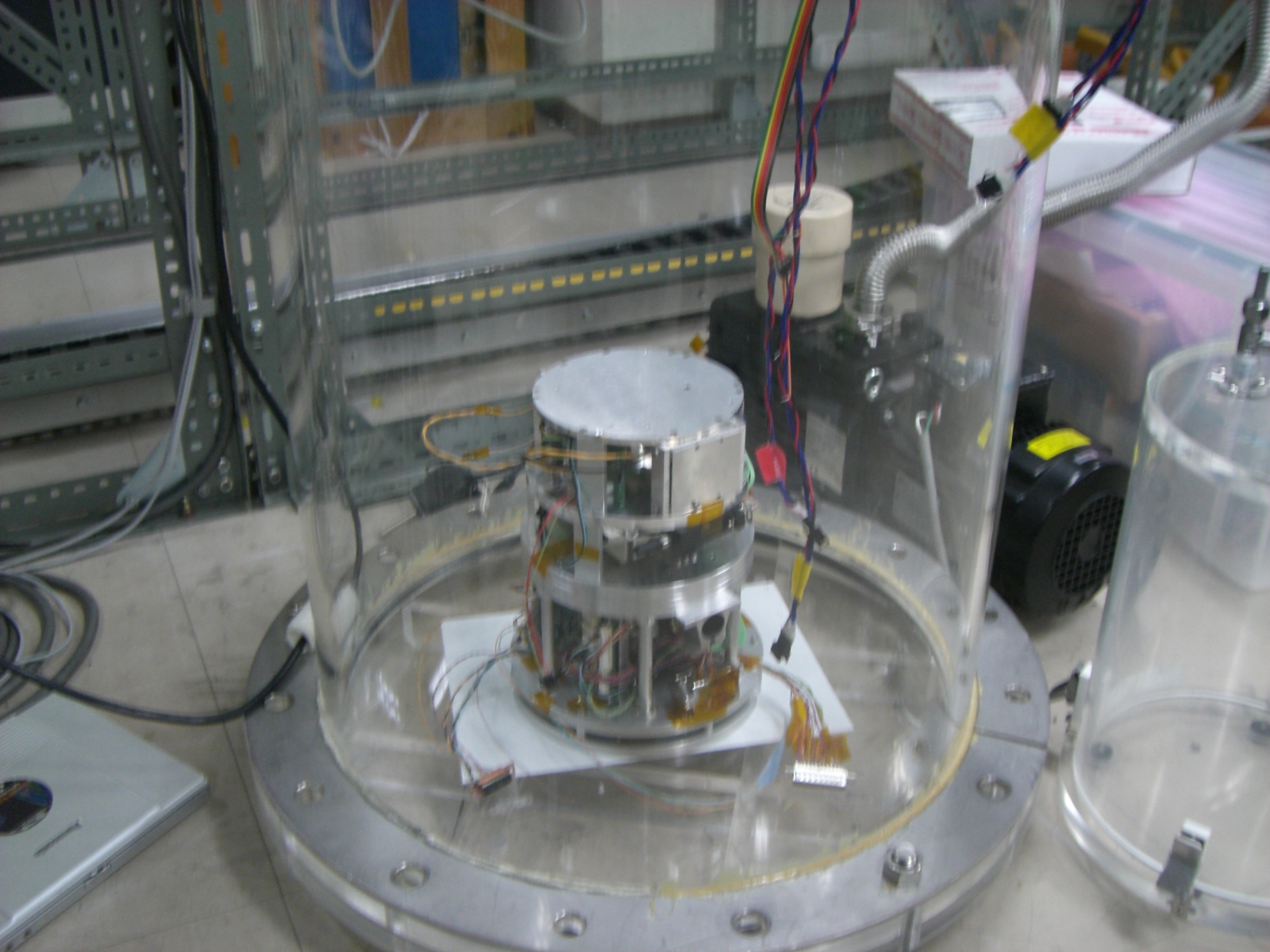
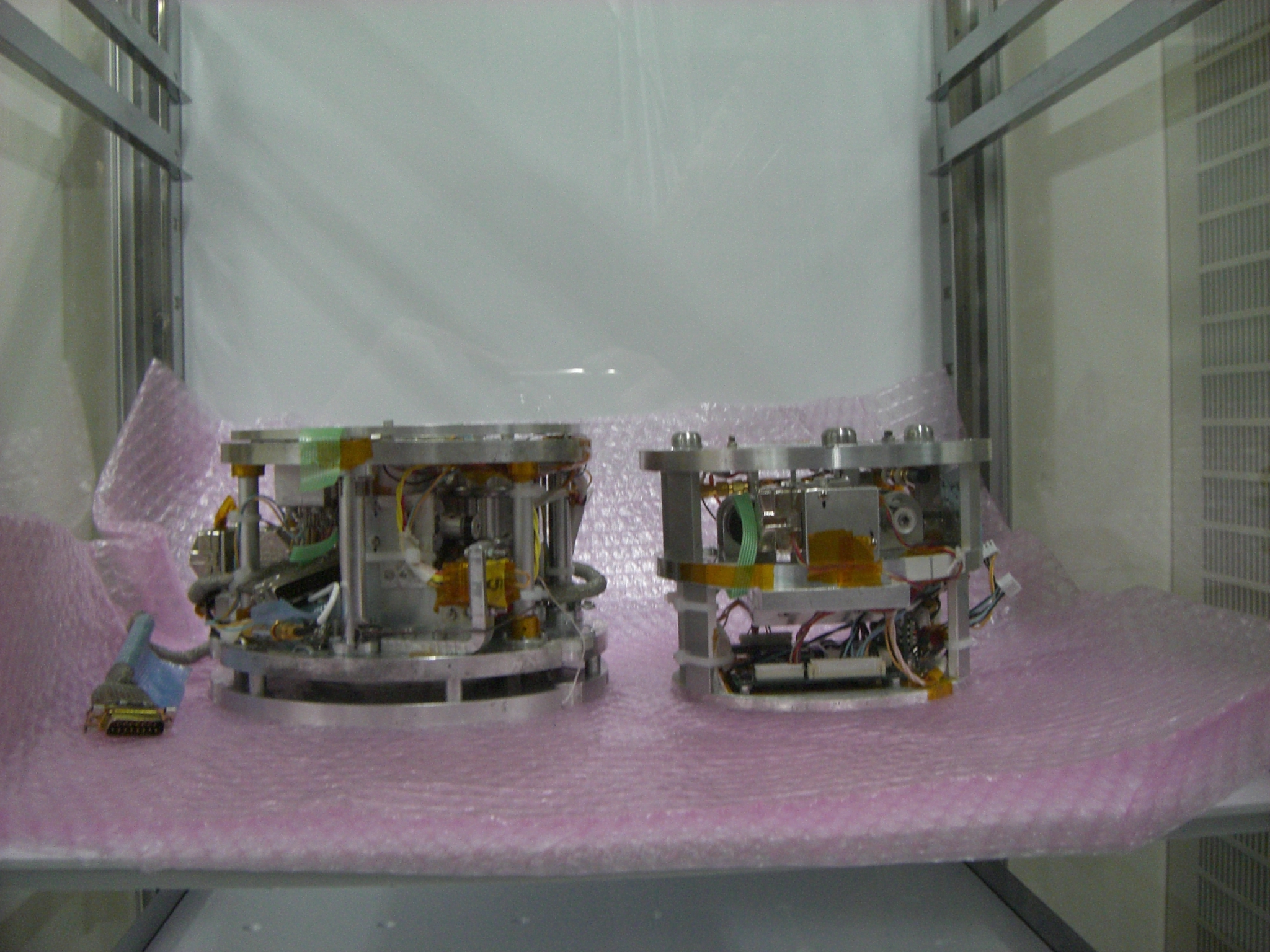
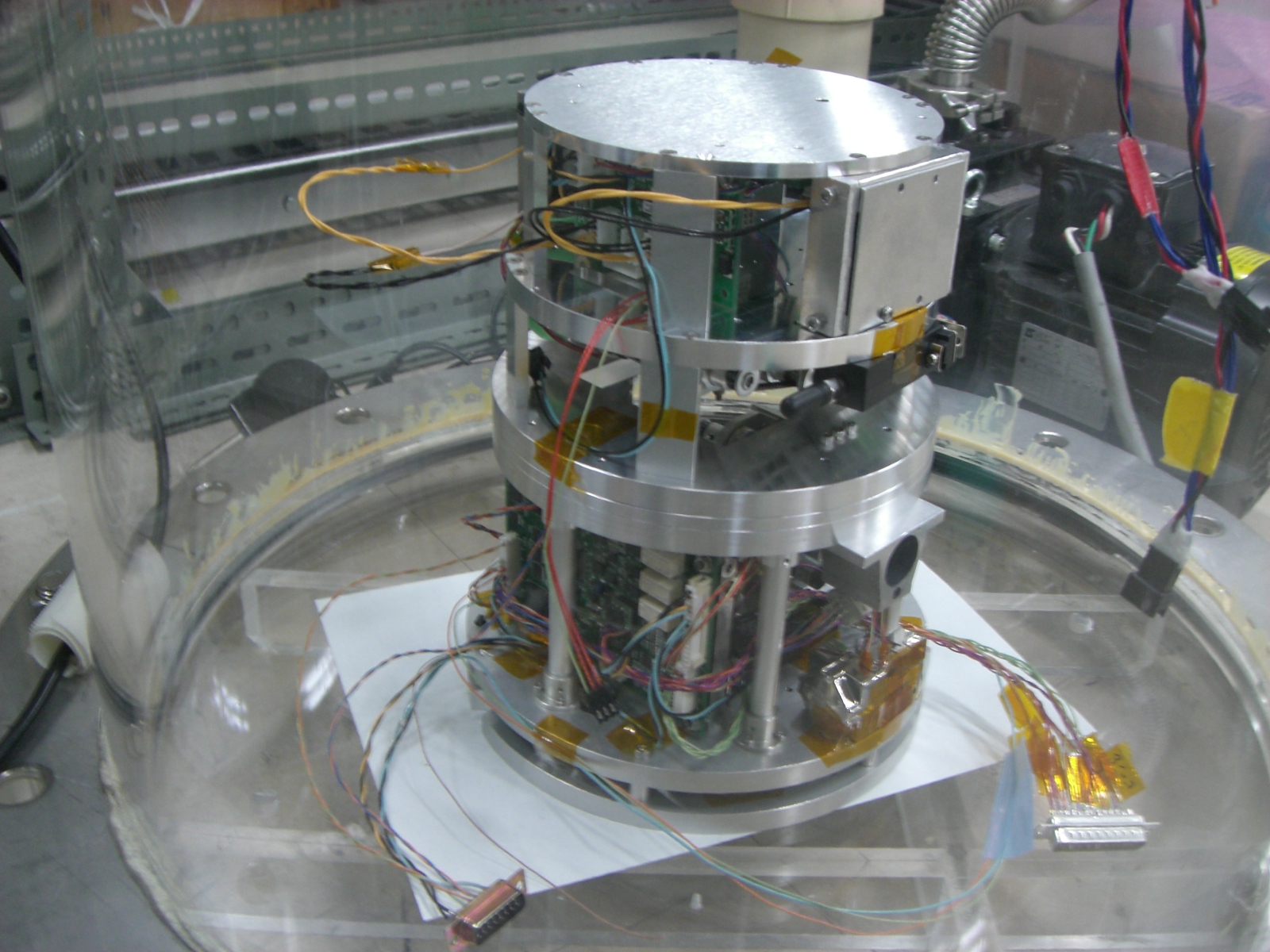
約10分間の宇宙実験 ★観測ロケットS-520-25号機 TSR-S 実験★ 2010年8月31日、宇宙航空研究開発機構(JAXA)の観測ロケットS-520-25号機TSR-S(Tethered SpaceRobotS)を鹿児島県内之浦から打ち上げた。観測ロケットS-520は高度300Kmまで飛翔し、10分程度の宇宙実験が可能であり、25号機ではJAXAを中心とした首都大学及び、静岡大学の導電性テザー実験との相乗り相乗り実験として、 テザー宇宙ロボット姿勢制御実験を実施した。この実験では、STARS(KUKAI)のテザー宇宙ロボット実験において、テザー伸展距離が十分でなかったため、テザー宇宙ロボットのテザー張力を利用した姿勢制御の実証には至らなかったことを受け、テザー宇宙ロボットの姿勢制御実験を目的とし、成功した。 Robotの姿勢制御実験結果からは、アーム動作により姿勢変動を制御することが可能であること、アーム 制御中心各をRobot機軸以外とすることにより、目標姿勢を変更できることが検証された。 また、Robot機軸の回転は姿勢制御に大きく影響することもわかった。 【TSR-S】
■観測ロケットS-520-25号機 実験概要 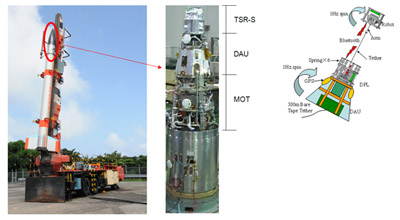 宇宙航空研究開発機構(JAXA)の観測ロケット S-520 は、最大高度300km程度に到達する約10分間に亘る弾道飛行を利用した宇宙実験が可能である。 S-520-25号機は、電離層中における電動性テザー(EDT)の基礎実験と、微少重力環境下におけるテザーを用いたロボットの姿勢制御実証を目的とし、 2010年8月31日05時00分(日本標準時間)に、内之浦宇宙空間観測所から打ち上げられた。 ロケットは正常に飛翔し、発射後55秒に回頭し、EDTの基礎実験後の発射後285秒からテザーロボットの実験を実施した。 ロケットは発射後283秒で最高高度309kmに達し、すべての観測を終え、内之浦南東海上に落下した。 ■TSR-Sフライト前撮影写真 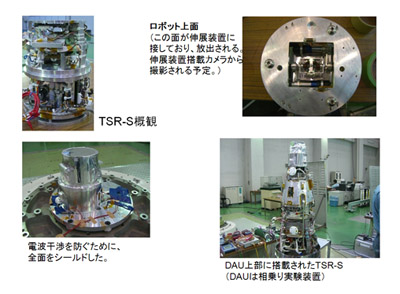 ■搭載カメラ画像(伸展装置からロボットを撮影) 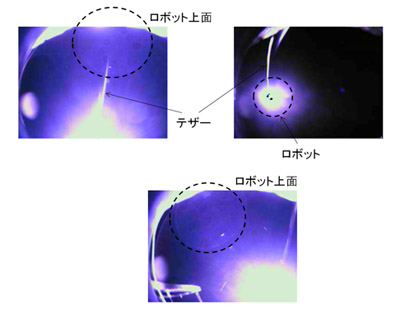 【技術資料】 ■S-520-25号機全体の実験装置構 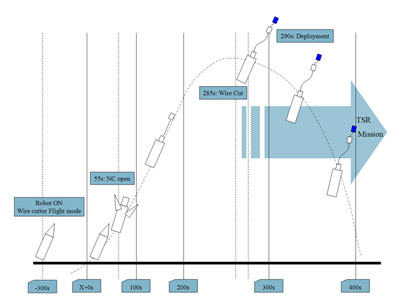 黒色のノーズコーン部分に実験装置は収納され、図右に示すとおり、下段からMOT、DAU、TSR-Sで構成される。ロケットは基軸周りに約1Hz回転をしながら飛翔する。MOTおよびDAUは電動性テザー実験装置であり、発射後120秒で分離され両者を連結する導電性テザーが伸展される。第2図にTSR-Sの実験装置構成詳細を示す。 TSR-SはDPLおよびRobotから校正され、両者はケプラー性テザーで連結されている。DPLはテザー伸展装置を搭載しており、DAUに剛結合されている。 発射後285秒でDPLとRobotのロウンチロック(打ち上げ固定)が解除され、290秒で放出バネによりRobotが放出される。その後、BluetoothによるDPL-Robot間の通信、DPLのテザー伸展装置によるテザー張力制御、Robotの姿勢制御を行う。 ■TSR-S 実験シーケンス 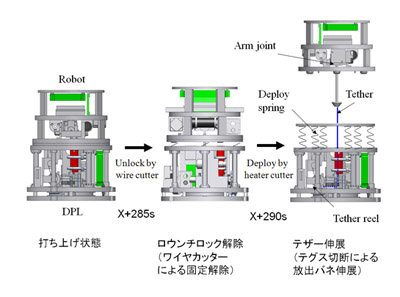 ■TSR-S 実験結果 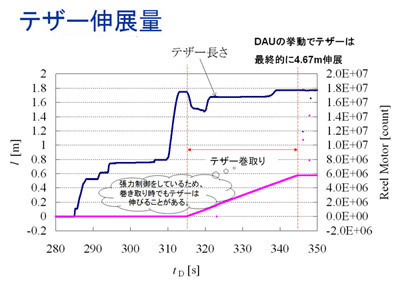 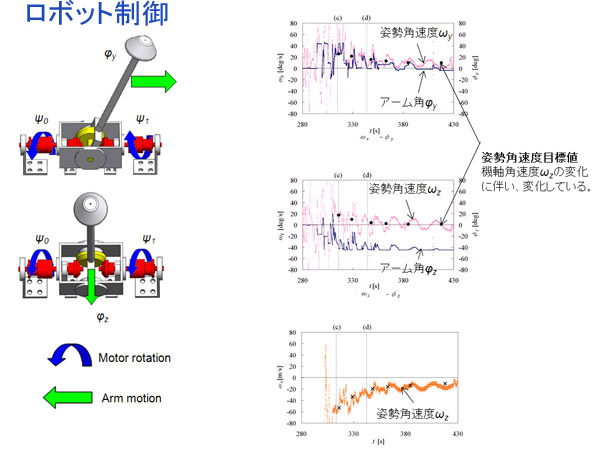 | |||||||||
|
Copyright © since 2006 Nohmi Lab. all rights reserved.
| |||||||||