Contents
愛称「GENNAI」 2014年2月28日打上 4月26日大気圏再突入 愛称「KUKAI」 2009年1月23日打上 CW送信 Information
■ はじめに
■ トピックス
■ プロジェクト履歴
■ 光学観測情報
■ お問い合わせ
links
■ 能見研究室
|
STARSプロジェクト
Space Tethered Autonomous Robotic Satellite |
| ||||||||||||
|
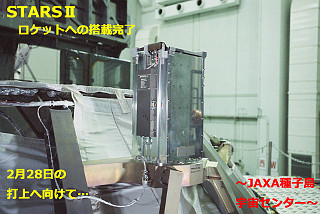
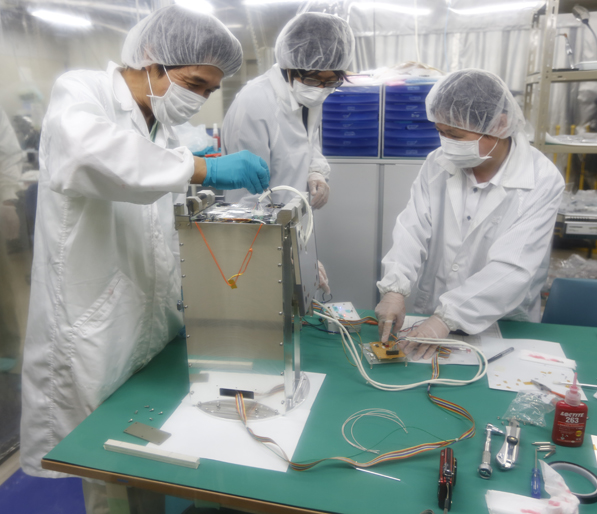
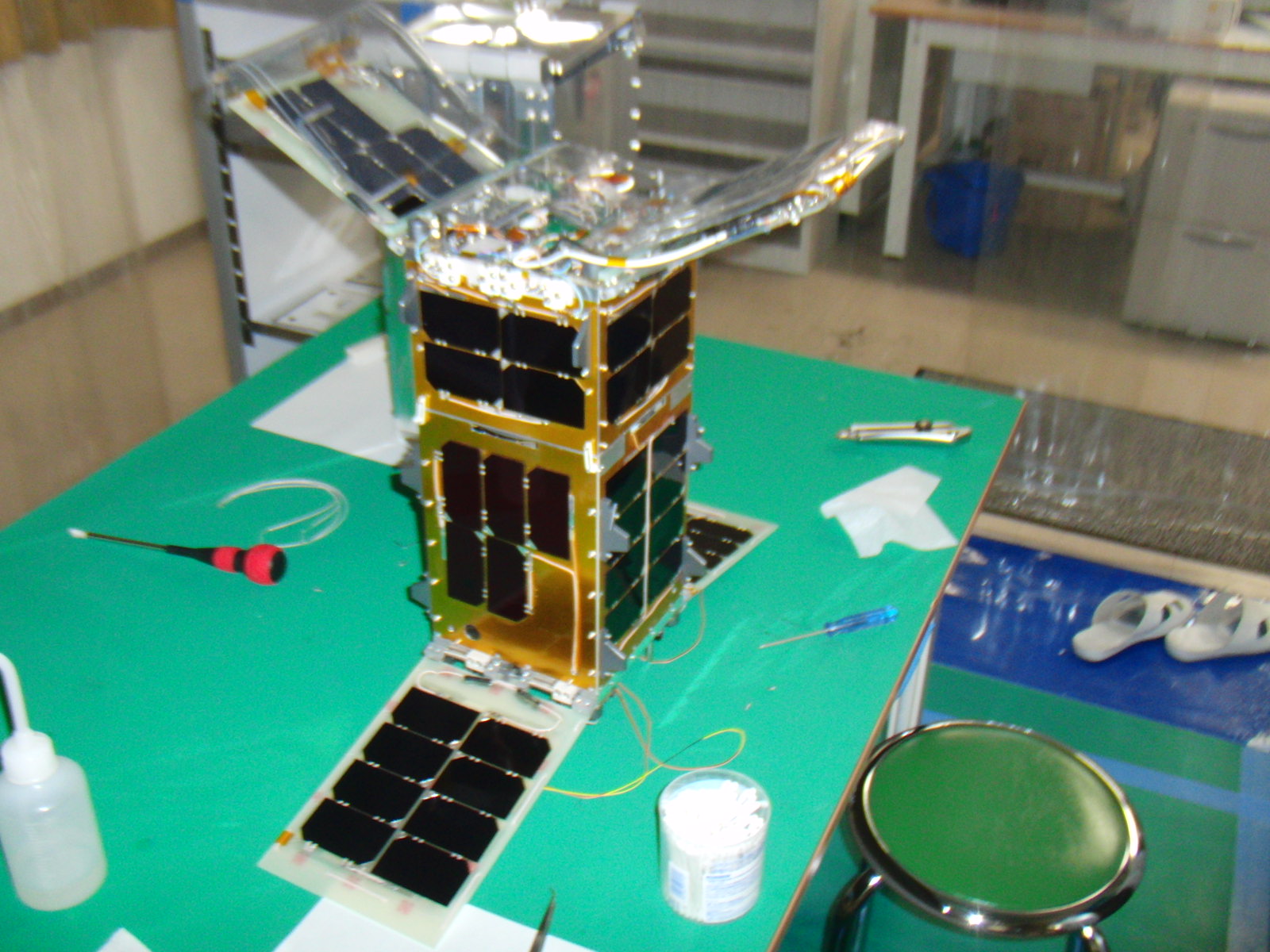
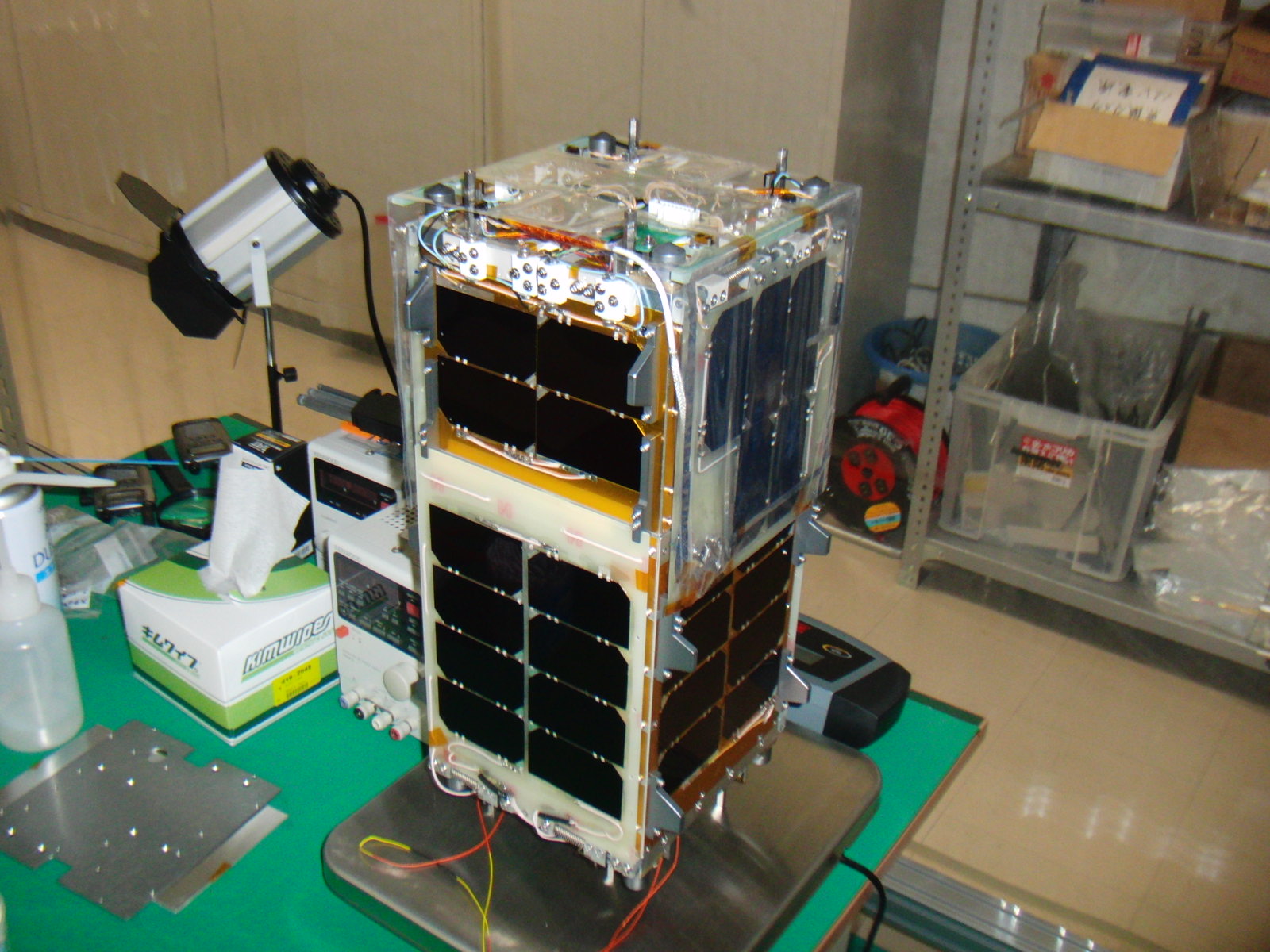
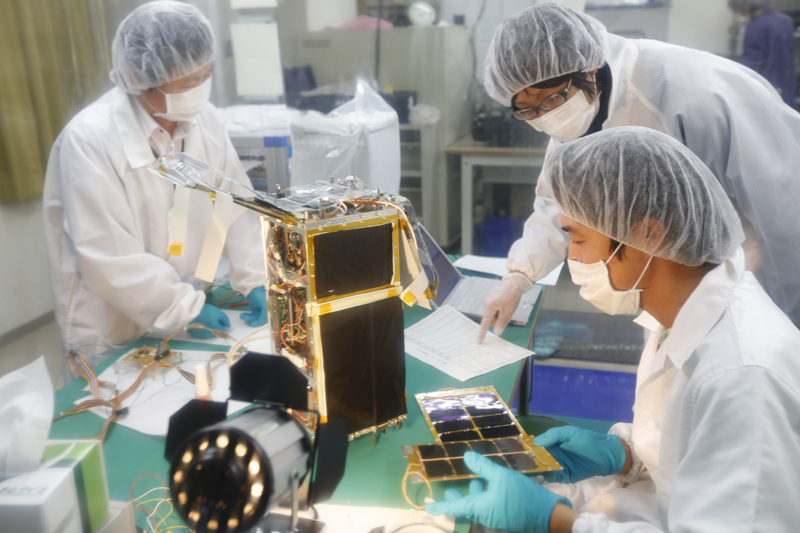
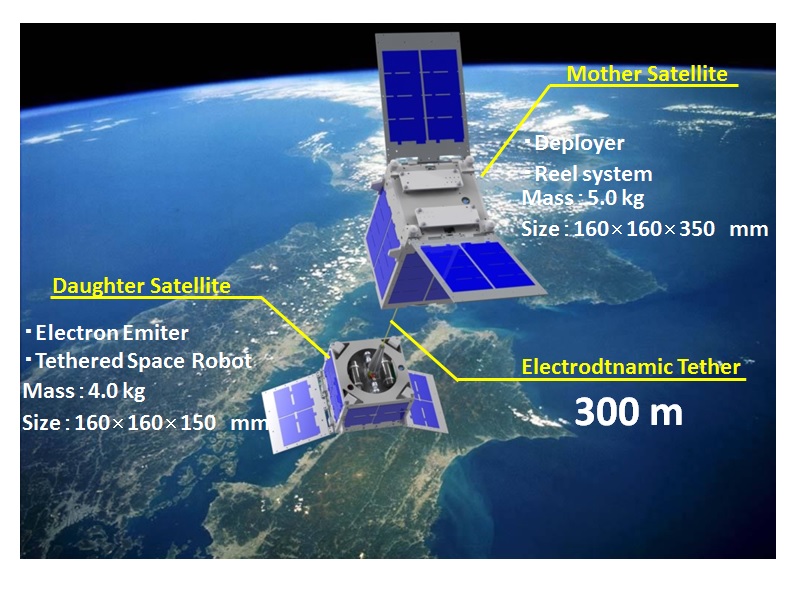
TOP > STARS-II 同年4月26日大気圏再突入 ★STARS-Ⅱ プロジェクト概要★ 香川大学ではこれまでに、2009年1月に打ち上げた香川衛星KUKAIでは、親子衛星、テザー衛星(5m/非導電性)、ロボット衛星の特徴を持ち、これらの技術実証に成功しました。さらに2010年8月の観測ロケットによる10分間の宇宙実験において、テザー張力を利用したロボット制御実験に成功しました。 宇宙デブリ除去に次に必要な技術は、テザー長距離伸展およびテザー電流発生です。これらの技術実証を主ミッションとする香川衛星2号機STARS-IIは、2010年に開発を開始しました。そして、2011年末に2013年度打ち上げ予定であるH-IIAロケットの相乗り衛星として選定されました。 テザー伸展に関しては、300mテザーを地球方向に伸展し,重力が傾斜していることを利用して安定状態とします。軌道上の重力傾斜を利用したテザー伸展は,国内初の実験となります。 重力傾斜安定状態において、軌道運動によりテザーが地球磁場を横切ると誘導起電力が発生します。誘導起電力の正極側で宇宙空間のプラズマから電子を収集し、負極側から電子を放出すると電流が発生します。ここで、テザーとしては被覆の無い電線(ベアテザー)を用います。ベアテザーによる電流発生は世界初となります。ベアテザーはテザー全体で電子を収集できるため、テザー端での収集と比べ効率的と考えられます。 以上、テザー長距離伸展およびテザー電流発生の実験後に、テザー宇宙ロボットの姿勢制御および移動制御実験を行います。すなわち、重力傾斜によるテザー張力を利用したテザー宇宙ロボットの姿勢制御、そして張力制御を用いたテザー伸展回収によるテザー宇宙ロボットの移動制御です。 GENNAI (STARS-II) 運用報告 GENNAI (STARS-II) は、2014年4月26日15時32分(日本時間)に大気圏再突入しました(Space Track の情報)。 香川大地上局では、同日10時58分からのパスでは親機CW信号を明瞭に受信しましたが、次の27日1:02のパスでは受信できず、消滅を確認しました。 GENNAIはテザー伸展による効果により、軌道降下速度が速い結果となりました。 GPM相乗り衛星の中で最速(詳細結果) また、テザー伸展による大気抵抗を考慮したシミュレーションによる評価で、300m伸展されている推定結果となりました。 テザー長さによる軌道降下速度(詳細結果) なお、子機の電力不足等により、衛星からのテザー伸展データは得られませんでした。 <子機電力不足の原因推定> 子機の電力不足は、地上との通信を目的として新規に開発した フィルムアンテナ を搭載しています。 フィルムアンテナの性能は、初号機KUKAIの パドルアンテナ より優れていることが、打ち上げ直後の通信により確認できましたが、 フィルムアンテナと一体となるパドルの展開がうまくいかず、太陽電池が正常に展開できなかったことが推定されます。
| |
| Copyright © since 2006 Nohmi Lab. all rights reserved.
| |||||||||||